Solving Optimization Problems
In this section, we explore how to solve an optimization problem once it has been defined, as outlined in the previous section. We can solve optimization problems using one of the optimization algorithms (also known as optimizers) from modOpt. Algorithms in modOpt are classified as either performant or educational algorithms. Performant algorithms are popular, widely-used algorithms sourced from external libraries, while educational algorithms are transparent algorithms fully implemented in modOpt, designed to support beginners and students learning optimization. Some of the performant algorithms are written in low-level languages such as C and Fortran. However, modOpt interfaces with these algorithms through precompiled sources, eliminating the challenges faced by users when compiling them locally on their computers. Educational algorithms, although primarily written in Python, are competitive with their performant counterparts on certain problems.
A simple way to solve a problem
Unlike the educational algorithms, users have an easy, alternate way to optimize using the performant algorithms. This approach uses a minimal API that allows users to solve optimization problems using a single line of code once the problem is defined. To demonstrate this, we solve the simple optimization problem:
In the code below, we use the ProblemLite class to model this problem.
To learn more about other modeling options supported by modOpt, please visit
the Defining Optimization Problems section.
import numpy as np
import modopt as mo
x0 = np.array([50., 5.]) # initial guess
xl = np.array([0., -np.inf]) # variable lower bounds
cl = np.array([1., 1.]) # constraint lower bounds
cu = np.array([1., np.inf]) # constraint upper bounds
c_scaler = np.array([10., 100.]) # constraint scaler
def obj(x):
return np.sum(x**2)
def grad(x):
return 2 * x
def con(x):
return np.array([x[0] + x[1], x[0] - x[1]])
def jac(x):
return np.array([[1., 1], [1., -1]])
# Define the problem as a ProblemLite object
# A ProblemLite object acts as a container for the problem constants, functions, and their derivatives
problem = mo.ProblemLite(
x0,
obj=obj,
grad=grad,
con=con,
jac=jac,
cl=cl,
cu=cu,
xl=xl,
c_scaler = c_scaler,
name='constrained_quadratic'
)
/Users/modopt/modopt/core/problem_lite.py:198: UserWarning: Objective Hessian function "obj_hess" not provided. Finite differences will be used if objective Hessian computation is necessary.
warnings.warn('Objective Hessian function "obj_hess" not provided. Finite differences will be used if objective Hessian computation is necessary.')
/Users/modopt/modopt/core/problem_lite.py:209: UserWarning: Lagrangian Hessian function "lag_hess" not provided. Finite differences will be used if Lagrangian Hessian computation is necessary.
warnings.warn('Lagrangian Hessian function "lag_hess" not provided. Finite differences will be used if Lagrangian Hessian computation is necessary.')
Once the problem object is defined and ready to be used by an optimizer,
simply call the optimize function by specifying a solver and its configuration using solver_options.
Here, we use the SLSQP optimizer with the options maxiter set to \(100\) and ftol set to \(1e-6\).
This will run the optimizer and return the results in the form of a dictionary.
results = mo.optimize(
problem,
solver='SLSQP',
solver_options={'maxiter': 100, 'ftol': 1e-6}
)
print(results)
message: Optimization terminated successfully
success: True
status: 0
fun: 1.0000000000063949
x: [ 1.000e+00 -3.197e-12]
nit: 2
jac: [ 2.000e+00 -6.395e-12]
nfev: 2
njev: 2
total_callbacks: 9
obj_evals: 2
grad_evals: 2
hess_evals: 0
con_evals: 3
jac_evals: 2
reused_callbacks: 0
out_dir: constrained_quadratic_outputs/2025-02-03_09.55.11.552413
The standard way of solving problems in modOpt
The standard and recommended way to optimize a problem is by directly using the
optimizer class objects.
This approach involves importing the optimizer of your choice from the library,
setting tolerances and other parameters for the chosen optimizer, and finally solving the problem.
Although slightly more verbose, using the optimizer classes can be more beneficial.
It provides access to additional optimizer information and offers more debugging options,
such as verifying the correctness of the user-provided first derivatives with the check_first_derivatives method.
The following code optimizes the problem above using the same optimizer but follows the recommended approach.
# Create an optimizer object with the same problem and options
optimizer = mo.SLSQP(
problem,
solver_options={'maxiter': 100, 'ftol': 1e-6}
)
# Check the first derivatives defined in the ProblemLite object
optimizer.check_first_derivatives(x=x0, step=1e-6)
# Solve the problem and get the results
results = optimizer.solve()
# Print the results
optimizer.print_results()
----------------------------------------------------------------------------
Derivative type | Calc norm | FD norm | Abs error norm | Rel error norm
----------------------------------------------------------------------------
Gradient | 1.0050e+02 | 1.0050e+02 | 1.2913e-06 | 1.2849e-08
Jacobian | 1.4213e+02 | 1.4213e+02 | 1.0008e-06 | 7.0416e-09
----------------------------------------------------------------------------
Solution from Scipy SLSQP:
----------------------------------------------------------------------------------------------------
Problem : constrained_quadratic
Solver : scipy-slsqp
Success : True
Message : Optimization terminated successfully
Status : 0
Total time : 0.0024521350860595703
Objective : 1.0000000000063949
Gradient norm : 2.000000000006395
Total function evals : 2
Total gradient evals : 2
Major iterations : 2
Total callbacks : 17
Reused callbacks : 0
obj callbacks : 5
grad callbacks : 3
hess callbacks : 0
con callbacks : 6
jac callbacks : 3
----------------------------------------------------------------------------------------------------
From the output of check_first_derivatives(), we can see that the derivatives we defined earlier are correct.
We also printed the results using the optimizer’s built-in print_results() method.
However, note that the callbacks made by the optimizer in this case is more than in the previous case.
These additional callbacks were made by the optimizer when checking the first derivatives using finite differences.
List of optimization algorithms
We only looked at the SLSQP optimizer in the examples above.
However, there are several more optimizers in the modOpt library.
For more information on any specific optimizer, please visit its page linked below.
Live visualization of optimization
Users have the option to visualize scalar variables during an optimization.
There are two categories of variables that can be visualized.
The first category includes the user-provided problem functions, derivatives, and their inputs,
which are called the callback_variables because these functions are
called repeatedly by the optimizer with its inputs.
Variables in this category include the optimization variables, objective, constraints, objective gradient,
and constraint jacobian, among others.
The second category, called the optimizer_variables, includes variables that are
made available by the optimizer after each optimization iteration.
These variables are optimizer-dependent and vary widely from one optimizer to another.
To see the list of variables made available by each optimizer, check the available_outputs attribute,
as shown in the code snippet below.
The full list of keywords for the callback_variables is
['x', 'mu', 'obj', 'con', 'grad', 'jac', 'obj_hess', 'lag_hess'],
where x represents the optimization variable vector, and mu represents the vector of Lagrange multipliers.
# Print available outputs for the SLSQP optimizer
optimizer = mo.SLSQP(problem=problem)
print(optimizer.available_outputs)
# Print available outputs for the TrustConstr optimizer
optimizer = mo.TrustConstr(problem=problem)
print(optimizer.available_outputs)
{'x': (<class 'float'>, (2,))}
{'x': (<class 'float'>, (2,)), 'obj': <class 'float'>, 'opt': <class 'float'>, 'feas': <class 'float'>, 'grad': (<class 'float'>, (2,)), 'lgrad': (<class 'float'>, (2,)), 'con': (<class 'float'>, (2,)), 'jac': (<class 'float'>, (2, 2)), 'lmult_x': (<class 'float'>, (2,)), 'lmult_c': (<class 'float'>, (2,)), 'iter': <class 'int'>, 'cg_niter': <class 'int'>, 'nfev': <class 'int'>, 'nfgev': <class 'int'>, 'nfhev': <class 'int'>, 'ncev': <class 'int'>, 'ncgev': <class 'int'>, 'nchev': <class 'int'>, 'tr_radius': <class 'float'>, 'constr_penalty': <class 'float'>, 'barrier_parameter': <class 'float'>, 'barrier_tolerance': <class 'float'>, 'cg_stop_cond': <class 'float'>, 'time': <class 'float'>}
To visualize scalar variables of interest, simply pass them as a list using the keyword argument visualize when instantiating an optimizer.
The callback variable names will always be prefixed with callback_ in the visualization.
If a variable name is available in both callback_variables and optimizer_variables, both will be plotted.
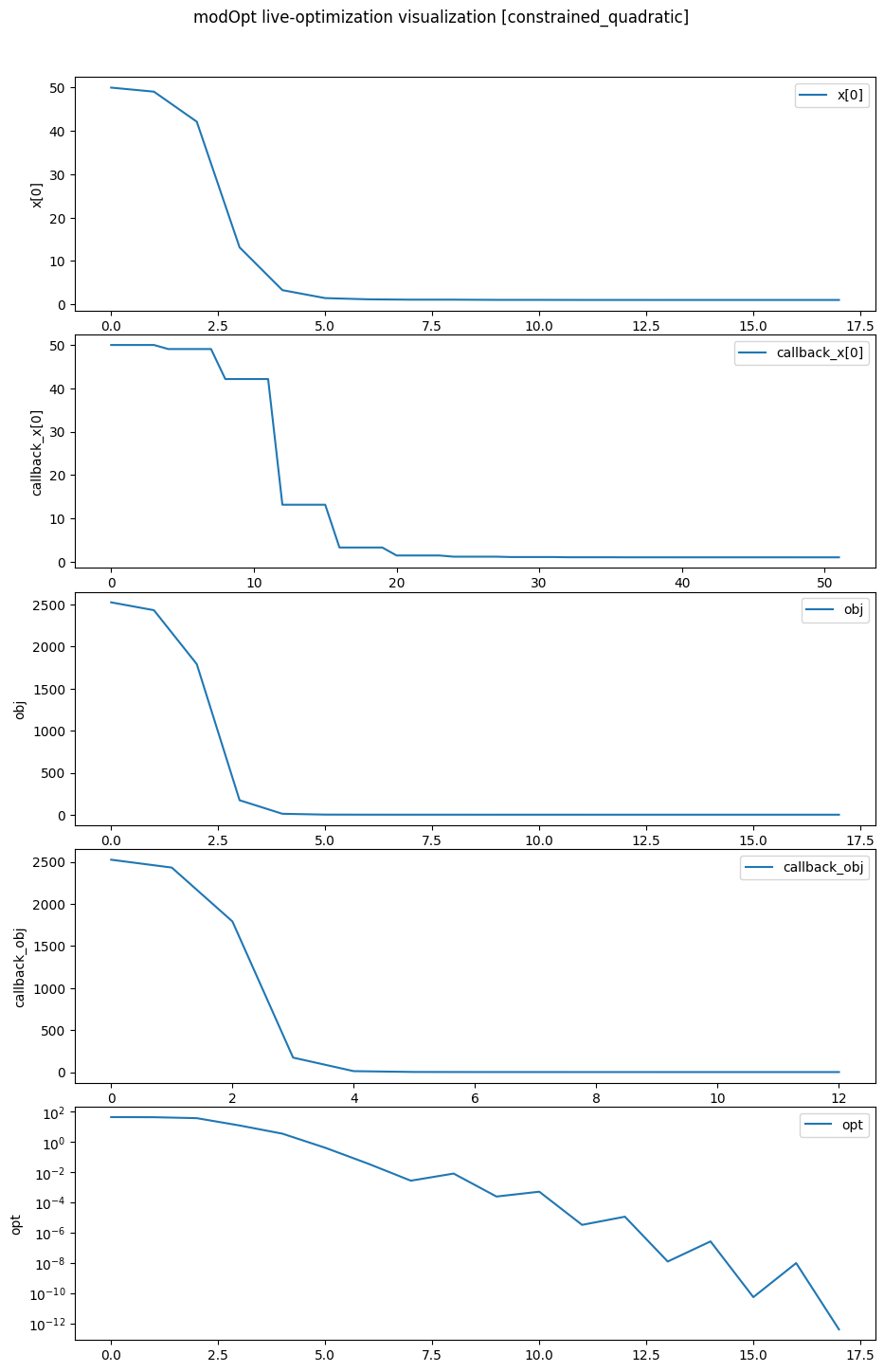
The code below demonstrates how to visualize the optimization variable \(x_1\), the objective, and optimality
when using the TrustConstr optimizer.
Note that the keep_viz_open parameter must be set to True to keep
the plot open once the optimization is complete.
%matplotlib inline
optimizer = mo.TrustConstr(problem=problem,
solver_options={'maxiter': 100, 'gtol': 1e-12},
visualize=['x[0]', 'obj', 'opt'],
keep_viz_open=True)
results = optimizer.solve()
optimizer.print_results()
# To visualize the results, when using the `optimize` function
# mo.optimize(problem, solver='TrustConstr', visualize=['x[0]', 'obj', 'opt'], keep_viz_open=True)
/Users/venv/lib/python3.9/site-packages/scipy/optimize/_differentiable_functions.py:504: UserWarning: delta_grad == 0.0. Check if the approximated function is linear. If the function is linear better results can be obtained by defining the Hessian as zero instead of using quasi-Newton approximations.
self.H.update(delta_x, delta_g)
Solution from Scipy trust-constr:
----------------------------------------------------------------------------------------------------
Problem : constrained_quadratic
Solver : scipy-trust-constr
Method : tr_interior_point
Success : True
Message : `gtol` termination condition is satisfied.
Status : 1
Total time : 9.935916662216187
Objective : 1.0000320268995626
Gradient norm : 2.000032026643136
Optimality : 4.3125588820511207e-13
Max. constr. violation : 0.0
Trust region radius : 639535.7360242795
Constraint penalty : 1.0
Barrier parameter : 3.200000000000001e-05
Barrier tolerance : 3.200000000000001e-05
Total function evals : 13
Total gradient evals : 13
Total Hessian evals : 0
Total constraint evals : 13
Total constr. Jacobian evals : 13
Total constr. Hessian evals : 0
Total iterations : 18
CG iterations : 12
CG stop condition : 1
Total callbacks : 52
Reused callbacks : 0
obj callbacks : 13
grad callbacks : 13
hess callbacks : 0
con callbacks : 13
jac callbacks : 13
----------------------------------------------------------------------------------------------------
Notice that for \(x_1\) and the objective, we see two plots each–one reported from the callbacks
and the other reported from the optimizer iterations.
The results printed at the end show the total_callbacks as 52 and obj_callbacks as 13
which match the number of points on the corresponding plots.
Similarly, we see 18 points plotted on the x[0], obj, and opt plots, corresponding
to the total number of optimization iterations reported in the results.
Recording
When optimizing a problem, users may want to record the entire optimization history for several reasons, such as post-processing, hot-restarting an optimization that terminated prematurely, or for further analysis. Refer to Post-processing for details on how to access and work with optimization records.
Users can set recording=True to save the full history of the callbacks
and optimizer iterations (see callback_variables and optimizer_variables discussed above).
The following code shows how to record an optimization using the same
example solved above.
optimizer = mo.TrustConstr(problem=problem,
solver_options={'maxiter': 100, 'gtol': 1e-12},
recording=True)
results = optimizer.solve()
optimizer.print_results()
Solution from Scipy trust-constr:
----------------------------------------------------------------------------------------------------
Problem : constrained_quadratic
Solver : scipy-trust-constr
Method : tr_interior_point
Success : True
Message : `gtol` termination condition is satisfied.
Status : 1
Total time : 0.439133882522583
Objective : 1.0000320268995626
Gradient norm : 2.000032026643136
Optimality : 4.3125588820511207e-13
Max. constr. violation : 0.0
Trust region radius : 639535.7360242795
Constraint penalty : 1.0
Barrier parameter : 3.200000000000001e-05
Barrier tolerance : 3.200000000000001e-05
Total function evals : 13
Total gradient evals : 13
Total Hessian evals : 0
Total constraint evals : 13
Total constr. Jacobian evals : 13
Total constr. Hessian evals : 0
Total iterations : 18
CG iterations : 12
CG stop condition : 1
Total callbacks : 52
Reused callbacks : 0
obj callbacks : 13
grad callbacks : 13
hess callbacks : 0
con callbacks : 13
jac callbacks : 13
----------------------------------------------------------------------------------------------------
Directory structure
When instantiating an optimizer for the first time for a problem, modOpt creates a directory for that problem,
named using the problem_name with the suffix _outputs.
Each time a new optimizer object is instantiated for the same problem,
modOpt creates a new directory within {problem_name}_outputs\ based on the timestamp at the time of instantiation.
All outputs generated by modOpt for an optimization will be placed in this directory.
The optimization recording is saved as an HDF5 file named record.hdf5.
The relative path to the outputs directory is stored in the out_dir attribute of the optimizer, and all files
available in the directory are stored in the modopt_output_files attribute.
The code below prints these attributes for the optimization performed above.
# Print the directory containing all the output files generated by the optimizer
print('Output Directory:', optimizer.out_dir)
print('Output Files:', optimizer.modopt_output_files)
Output Directory: constrained_quadratic_outputs/2025-02-03_10.51.04.574227
Output Files: ['directory: constrained_quadratic_outputs/2025-02-03_10.51.04.574227', 'modopt_results.out', 'modopt_summary.out', 'record.hdf5']
Getting readable outputs from the optimizer
Since HDF5 files from optimizer recording are incompatible with text editors,
users may set the readable_outputs option during optimizer instantiation
to export optimizer-generated data (optimizer_variables) as plain text files.
For each variable listed in readable_outputs, a separate file is generated,
with rows representing optimizer iterations.
The list of variables allowed for readable_outputs is any
subset of the keys in the available_outputs attribute.
These dynamically updated plain text files allow users to track
different optimization variables during the optimization.
The following code demonstrates how to set the readable_outputs option
for the TrustConstr optimizer.
optimizer = mo.TrustConstr(problem=problem,
solver_options={'maxiter': 100, 'gtol': 1e-12},
readable_outputs=['obj', 'con', 'x', 'opt', 'feas'])
results = optimizer.solve()
optimizer.print_results()
# Print the directory and its contents to see the generated readable output files
print('Output Directory:', optimizer.out_dir)
print('Output Files:', optimizer.modopt_output_files)
Solution from Scipy trust-constr:
----------------------------------------------------------------------------------------------------
Problem : constrained_quadratic
Solver : scipy-trust-constr
Method : tr_interior_point
Success : True
Message : `gtol` termination condition is satisfied.
Status : 1
Total time : 0.07374691963195801
Objective : 1.0000320268995626
Gradient norm : 2.000032026643136
Optimality : 4.3125588820511207e-13
Max. constr. violation : 0.0
Trust region radius : 639535.7360242795
Constraint penalty : 1.0
Barrier parameter : 3.200000000000001e-05
Barrier tolerance : 3.200000000000001e-05
Total function evals : 13
Total gradient evals : 13
Total Hessian evals : 0
Total constraint evals : 13
Total constr. Jacobian evals : 13
Total constr. Hessian evals : 0
Total iterations : 18
CG iterations : 12
CG stop condition : 1
Total callbacks : 52
Reused callbacks : 0
obj callbacks : 13
grad callbacks : 13
hess callbacks : 0
con callbacks : 13
jac callbacks : 13
----------------------------------------------------------------------------------------------------
Output Directory: constrained_quadratic_outputs/2025-02-03_11.16.39.260346
Output Files: ['directory: constrained_quadratic_outputs/2025-02-03_11.16.39.260346', 'modopt_results.out', 'modopt_summary.out', 'obj.out', 'con.out', 'x.out', 'opt.out', 'feas.out']
From the output files listed in the console output above, we see that
five additional plain text files
(‘obj.out’, ‘con.out’, ‘x.out’, ‘opt.out’, ‘feas.out’)
were generated by modOpt based on the readable_outputs argument
provided to the optimizer.
Disabling modOpt-generated outputs
By default, modOpt generates the modopt_results.out file along with other files,
depending on the optimizer.
To disable the generation of all output files, set turn_off_outputs=True
when instantiating an optimizer, as shown below.
optimizer = mo.TrustConstr(problem=problem,
turn_off_outputs=True)
For more details on the Optimizer class or any of the features discussed above,
visit the API Reference page.